Para controlar la dirección y altitud (orientación del avión con respecto al horizonte) en una aeronave, es necesaria la manipulación de los sistemas de control de vuelo; los alerones, el elevador y el timón constituyen el sistema de control primario y son indispensables para dirigir el avión a partir del ajuste de las fuerzas generadas durante el vuelo. El movimiento de cualesquiera de las tres superficies principales permite el control del vehículo con respecto a tres ejes de rotación (figura 2). FIGURA 2. Superficies de control de vuelo primarias. Fuente: Federal Aviation Administration, 2000.
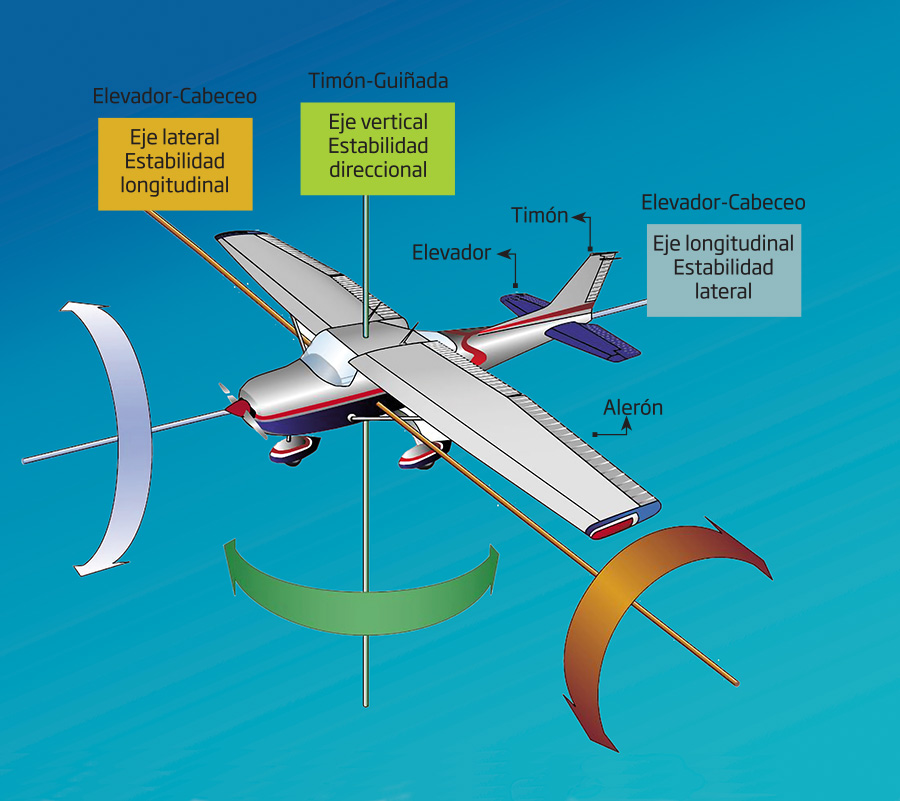
El elevador, ubicado en la parte trasera del avión, controla el paso alrededor del eje lateral; es decir, el cabeceo. Cuando el elevador se encuentra inclinado hacia arriba, la cola del avión se mueve hacia abajo y la nariz hacia arriba; el efecto contrario logrará el descenso de la aeronave.
El timón, al igual que el elevador, se encuentra en la parte trasera. Éste controla el movimiento al crear un levantamiento lateral llamado guiñada. Cuando el timón se mueve a la izquierda, la cola se desplaza a la derecha y hace girar la nariz del avión a la izquierda respecto del eje vertical.
En los vehículos aéreos no tripulados, cada superficie de control de vuelo presenta una colección de dispositivos electromecánicos —generalmente, servomotores— que traducen comandos eléctricos en movimiento; es decir, son los músculos que mueven las superficies de control.

Enfoque de control
de fuerza para UAV
Enfoque de control
de fuerza para UAV
Han pasado miles de años desde que los humanos miraban el cielo observando el vuelo de animales o insectos, pensando que para los hombres volar era sólo una quimera. Actualmente, cuando miramos el firmamento, es posible no sólo observar aves, podríamos identificar alguna aeronave, o al menos, el rastro que dejan éstas a su paso. Y aún hay más, en las grandes ciudades de países desarrollados es común mirar drones controlados remotamente. Así, con la creciente popularidad de este tipo de vehículos, pronto el cielo se verá plagado de los también llamados UAV’s.
FIGURA 1. Prototipos de UAV fabricados en la UNAQ: a) planeador, b) computadora de vuelo dentro del planeador, c) y d) bancos de pruebas de ala rotativa, e) prototipo de ala circular.
Sin importar el tipo de dron, sus especificaciones o aplicaciones, una de las características que se desea mejorar es su desempeño durante el vuelo, tema que está siendo estudiado en la Universidad Aeronáutica en Querétaro (UNAQ), debido a que la comunidad universitaria ha diseñado y fabricado diversos prototipos de vehículos aéreos no tripulados de ala fija (figuras 1a y 1b), rotativa (figura 1c y 1d), estructura circular (figura 1e), etc. El presente artículo se centrará en los UAV de ala fija.
Las superficies de control de vuelo requieren un sistema de control capaz de reducir las probabilidades de fallo durante operación, asegurando que la respuesta del sistema sea la esperada. FIGURA 3. Esquema de control de posición para un motor.
Un sistema de control tiene la finalidad de mantener una variable en un intervalo de valores deseado; para lograrlo, es necesario definir un sistema de ecuaciones que describa el comportamiento del objeto de estudio. Dichas ecuaciones son una representación de la realidad y obtenidas a partir del estudio de las variables que intervienen en un proceso, mediante la interpretación de los principios físicos aplicables.
Una vez que se tiene el modelo matemático llamado planta, se analiza las características que establece dicha información, se genera un esquema de control y, a partir de las necesidades de la aplicación, se propone un controlador que será el encargado de ajustar la respuesta para lograr suficiente precisión a la salida. En el esquema de control, se incluye la medición (o, en algunos casos, estimación) de la variable por controlar; información que es devuelta al sistema (esto es realimentación) para que, al ser procesada, pueda ser identificado el grado de desviación; es decir, la diferencia del valor medido con respecto del valor deseado (llamado error). Dicha desviación requerirá una acción correctiva con el fin de minimizar tal falla; esta tarea es la principal función del controlador.
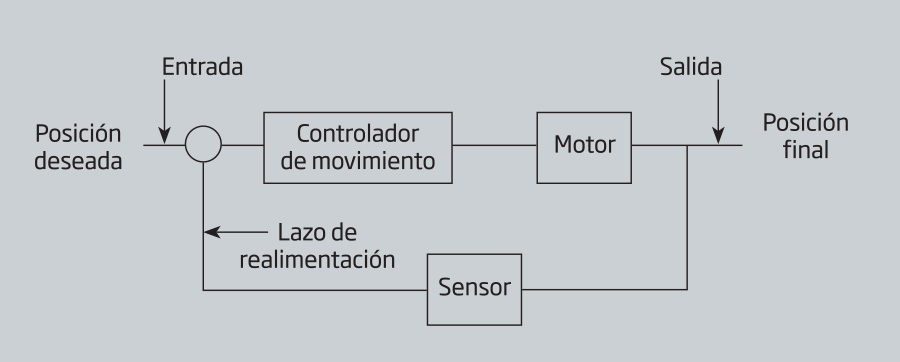
Para el control de posición de las superficies de control de vuelo en un UAV, la planta será el servomotor; la entrada al sistema, la posición deseada de la superficie de control; y la salida, la posición real a la que se movió el servomotor, misma que afectará la dirección y actitud de la aeronave (figura 3).
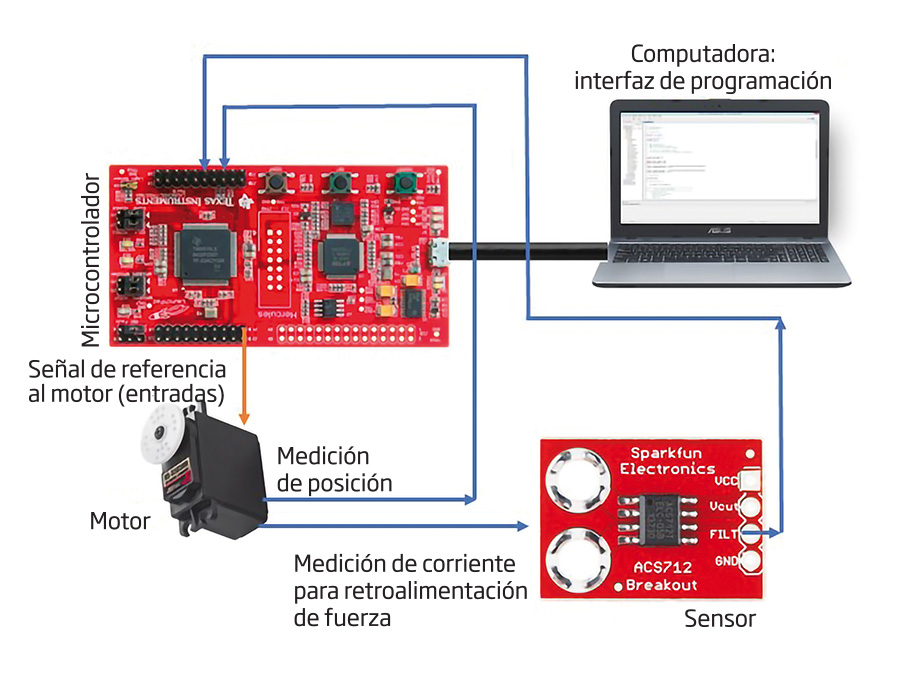
Muchos investigadores han sumado esfuerzos para aplicar esquemas y teorías de control con el fin de lograr manipular aspectos del movimiento de un UAV, como son la posición, la trayectoria, la velocidad o aceleración.1 Esta perspectiva ha permitido obtener buenos resultados durante el vuelo de un UAV; sin embargo, deja de lado un aspecto muy importante en el desempeño del vehículo: el ambiente y las restricciones que éste puede generar. FIGURA 4. Banco de pruebas para sistema de control diseñado. Se muestra un microcontrolador que es responsable de procesar la información del sistema, por lo cual las mediciones de posición y fuerza se conectan a una de sus entradas; de igual manera, el microcontrolador está encargado de dar la orden de movimiento al motor, ya que contiene el controlador diseñado.
Sin importar el nivel de control de movimiento con el que cuente un UAV, su instrumentación o la exactitud del modelo de la aeronave, siempre tendrá que enfrentarse a un ambiente poco predecible,2 generando, en las superficies de control del vehículo, fuerzas capaces de evitar que éste cumpla con sus tareas, exceda sus límites de diseño, se pierda de la ruta establecida o, incluso, presente daños en alguna de sus partes.
Pensando en esto, surge la idea de abordar el problema del control de movimiento de un UAV agregando un enfoque de control de fuerza en las superficies de control de vuelo que permita a la aeronave enfrentar dificultades originadas en cambios del entorno.
El objetivo de este enfoque de control es permitir que el movimiento de las superficies de control de vuelo se ajuste en relación con las fuerzas externas, a partir de lo cual, el sistema pueda decidir si es capaz de contrarrestar dicha fuerza y alcanzar su posición deseada, o evitar enfrentarse a una situación que podría dañar la aeronave.
En el marco del proyecto “Control de fuerza en superficies de control de vuelo” desarrollado en la Universidad Autónoma en Querétaro, se ha propuesto un controlador de posición con realimentación de fuerza para un servomotor comercial con aplicaciones a un UAV que opera con componentes de radiocontrol.
Al analizar la respuesta de los experimentos realizados en el banco de pruebas, se seleccionó el esquema de control cuya respuesta exhibía las mejores características, entre las que destacan: un sistema sensible a las fuerzas externas, con capacidad de respuesta en milisegundos, precisión por encima de 98% a la posición deseada, capaz de reducir la fuerza de salida del servomotor hasta un 5%.
La siguiente etapa pretende adaptar el sistema para realizar pruebas en un UAV; en dado caso, el sistema soportaría vehículos de hasta 25 kg, de ser exitosas dichas pruebas, el enfoque de control de fuerza contribuiría al desarrollo de los sistemas de control de vuelo en las aeronaves, lo cual constituiría una innovación, al presentar una perspectiva diferente a la tradicional.
- Erlbacher, E. A. (2000). Force control basics. Industrial Robot: An International Journal, 27(1), 20–29.
- Federal Aviation Administration. (2000). Flight Controls. In Pilot’s Handbook of Aeronautical Knowledge (p. 12). Oklahoma.
- NASA. (2015). Forces in a climb. Retrieved January 1, 2016, from https://www.grc.nasa.gov/www/k-12/airplane/climb.html
- Ogata, K. (1996). Discrete-Time Control Systems (TKM Produc). Minnesota: Prentice Hall.
- Ostry, D. J., & Feldman, A. G. (2003). A critical Evaluation of the Force Control Hypothesis in Motor Control. Experimental Brain Research, 153(3), 275–288.
- Ramírez, V., Goretti (2018). Sistema de control de fuerza en superficies de control de vuelo. Universidad Aeronáutica en Querétaro. Colón, Querétaro.
- Tangirala, A. K. (2015). Principles of System Identification. (Taylor & Francis Group, Ed.). Boca Raton, FL: CRC Press.
Es Ingeniera en Mecatrónica por el Instituto Tecnológico de Querétaro y candidata a Maestra en Ingeniería Aeroespacial por la UNAQ. Actualmente, Profesora en la Universidad Aeronáutica en Querétaro. Ha participado en diversos proyectos financiados por el Conacyt y, desde 2017, responsable técnico del proyecto “Sistema de bajo consumo de energía para el desarrollo y entrenamiento en sistemas satelitales”, apoyado por el Fondo Conacyt-AEM.
Es Doctor en Automática y Robótica por la Universidad Politécnica de Madrid. Actualmente, Profesor Investigador en la Universidad Aeronáutica en Querétaro, así como colaborador del cuerpo académico de Diseño y control de sistemas. Ha realizado estancias técnicas en Argentina (INAUT), Japón (MEL, AIST), CICATA Querétaro (IPN) y España (DISAM, UPM), donde ha dirigido tesis de licenciatura y maestría. Es miembro del SNI, ha realizado publicaciones en revistas de alto impacto y está interesado en apoyar el desarrollo nacional mediante su participación en foros y publicaciones nacionales.
C. e.:
alberto.traslosheros@unaq.edu.mx